
CALM – USA
Date: May 2020
status: Finalised
Advanced image processing and analytics for Electronics and Microelectronics systems quality control (Contact us for more detail)
AFWERX
funding: US Funded
Date: May 2018 - Jan 2020
status: Finalised
Automatic quality and provenance evaluation of micro and electronic components and assembly systems.
There 70 applications for this call, three consortiums were funded and then the solution went to a competition to win a potential large contract with the US Airforce (we are in the race for this). Our solutions alongside the other two consortiums went on a live competition, and we beat the two well-known American competition. This project also has major exploitation potentials in near future worth millions of dollars and Pounds. UK DSTL and DASA is also interested and negotiations are ongoing.

The High-Speed Scanning for detecting Tampered Electrical Electronic Devices (HISTEED)
funding: Government Funding Council (DSA):ACC106975
Date: 01/07/2018
status: Finalised
The aim of this project is to explore the feasibility of a novel Image Processing and Event-Based Machine Learning technology that increases the accuracy,
speed as well as the systematic scale up of screening Electronic and Electrical Devices for hand luggage.
HISTEED 2
Date: 01/03/2019
status: Commenced
DAS Funded under FASS programme, of full implmentation of the project in phase 2 to research,
develop and validate an advanced Machine Learning and AI solution for screening Electrical and Electronic Devices in Luggage.
Real-Time ECU Modelling and Optimisation: understanding and improving the ECU in real-time through better situation awareness and expanded sensor and actuation network architecture and data modelling.
Date: 01/10/2016
status: Commenced
The information systems infrastructure for human-based capability models (individual and networks).
Date: 01/09/2014
status: Finalised
Contact us for more detail
EventCluster a new generation of EventTracker.
Date: 01/09/2012
status: Finalised
Contact us for more detail
EventTracker
Date: 01/05/2013
status: Finalised
EventTracker can be considered as a smart recorder of events.
Analogous to a Blackbox but not only a recorder but an instrument that facilitates preliminary data and knowledge construction .
[Better Situation Awreness]
Applications: Real-Time Input Variable Selection and Sensitivity Analysis.
Motivation:
1.Systems need to respond to externally generated stimuli within a finite-specified period (i.e. Real-Time) a Better Situation Awareness for Quick Response.
2.Producing time-critical accurate knowledge about the state of the system still remains a major challenge à Innovative.
3.The knowledge is critical to the safety and the integrity of the operators and equipment à Economical Gain.
4.Industrial systems’ capability to capture data (SCADA) and flexibility to adjust to changing system requirements à Existing Technological Capabilities.
Multiple access bluetooth device for audio conferencing and voice distrubution.
Date: 02/01/2012
status: Finalised
Contact us for more detail
NEAR-REAL VIRTUAL ENVIRONMENT (NERVE) FOR PHANTOM LIMB PAIN: System Integration, Optimisation and Personalisation.
Date: 01/01/2011
status: Foundation
Motion Detection and Virtual Limb Re-Embodiment Adaptation:
Personalisation and Adaptation of Movement, Visual and Propiceptive Feedback. (proof of concept) - [Achieved].
Demo (by Antoine Mallet)
Satistica Quality and Utility Inspection Device (SQUID)
Date: 01/07/2012
status: Finalised

Human-Based Network Capability Models
Date: 15/1/2010
status: Finalised
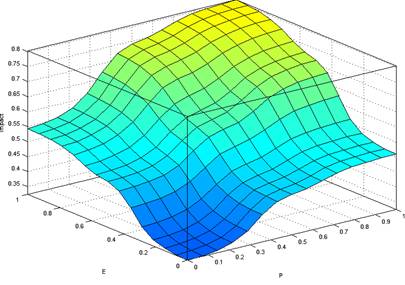
Aim: To build a fundamental conceptual model which can predict a group of individuals’ collective (Network) capability.
4. Test the model through empirical studies .
Objectives:
1. Use an existing model of “Individual’s Capability” and extend the concept to human networks.
2.Determine the factors in human networks (natural or by design) that may affect collective capability – Network Dynamics.
3. Construct an analytical-conceptual model that describes collective capability.
Beneficiaries:
- Such model can enable team builders and group leaders assess and compare the capability of human based networks and thus predict performance.
in other words
- The model enables decision makers with an objective instrument to assess current capabilities and conduct what if scenarios.
more importantly;
- The proposed empirical model will also allow team builders to assess the effect their intervention on team capability may have.
Virtual Personalised System to address Phantom Limb Pain in Patients.
Date: 01/11/2009
status: Foundation
Product and Services Environmental Impact Measurement Web Tool (EcoXchangeTM).
Date: 01/11/2010
status: Finalised
The Theory and Modelling of Individual's Capability - Impact and Utilisation of Resources
Date: 28/4/2011
status: Finalised


